自制步进电机驱动电路
本电路采用了Bourn公司的双向数字旋转编码器、PIC16C54微控制器及UCN5804B步进电机驱动IC等器件,组成了步进电机驱动电路,代表了从前用一大堆门电路和功率晶体管组成的电路。套件中不提供步进电机。另外,本电路仅适用于6引线单极步进电机,不适合用于4引线双极步进电机。数字触点式旋转编码器数字触点式旋转编码器也称为数字盘控制器、比特开关、格雷(Grey)开关或数字开关。该旋转编码器提供一对数字格雷码信号,此信号输入微控制器C,确定了步进电机的旋转速度及旋转方向。
其特点是无需模数转换器(ADC),可直接将数字化的模拟量转换成数字量。要了解套件中ECWIJ型旋转编码的详细资料,可向本刊网站查询。

微控制器PIC16C54
PIC16C54微控制器从机械式编码器输入编码信号转换成两个单独的信号:脉冲信号及旋转方向信号。当旋转编码器时,产生两个相位差90的方波。通过这种数字操作,C输出电机的步距信号旋转方向。
一旦C做出步进电机的旋转方向及电机的步距,由C的7脚及6脚输出相应的信号,此信号输入步进电机驱动器UCN5804.由UCN5804来驱动步进电机。
驱动器UCN5804
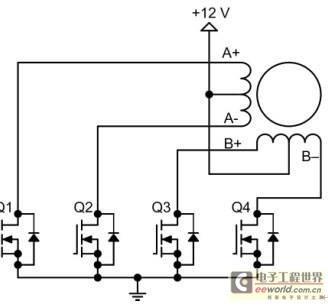
该驱动器用于6线单极步进电机,工作电压可达35V,输出电流可达1.25A。步进电机的旋转方向信号由C的7脚输出接入5804的11脚,其步距脉冲信号由C的6脚输出接人5804的14脚。1、2、3、6、7、8脚分别与步进电机相应的引线连接,步进电机的引线图如右图所示。
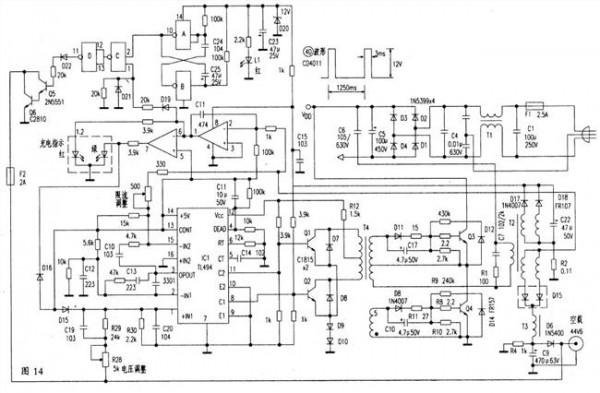
整个步进电机驱动电路如下图所示。驱动器的9脚及10脚分别控制单相及半步距工作。5引线及8引线的步进电机若接成右图的形式也适用。
半步距及单/双相控制可参考有关步进电机工作方法的介绍。在单相工作时,在一个时间内仅1个线圈吸引转子,另一方面,双相驱动激励两个线圈吸引转子,使转子每一个启动位置有更好的力矩及转速特性。
半步距工作是单相与双相驱动结合而成,引起转子每一个旋转需要两倍相同的步距。

电路简介该电路十分简单(上图)。旋转编码器的X、Y脚分别与C的17、18相连接,其中间脚接地。X、Y两端分别接1.5k的R4、R5上拉电阻,与5V电源相连接。编码器是24周型,每转一圈可精确地产生96个脉冲。
PIC16C54微处理器采用RC振荡器作时钟输入,按上图中的R3及Cl的值,其时钟频率约3MHz。要注意的是简单地改变R3的阻值将增加或减小时钟速度,它将增加或减少电机的速度。
PIC16C54及UNC5804都是+5V电压工作,它们由78L05稳压器来提供,C2~C4是其输出及输入电容器。有趣的是驱动器在5V下工作,而尽管电机端对付到35V。
可提供步进电机连续旋转,C的11脚通过R6下拉到地。

若11脚接+5V,其结果是步进电机按最大速度旋转。
这看起来有点离奇,C的l脚、2脚通过R2、Rl上拉到+5V,这是有理由的。这两个脚为高电平时,与编码器连接的端口为输入端口。它们并不是直接连接到5V电源上,这是有一点微妙的理由:端口的分配由软件来完成,所以相应的管脚可以是输人口或是输出口。
这问题是在口周围有一点儿电噪声时,端口可能败坏,其结果是管脚1将由电源5V降到地,若没有Rl、R2,则C将死亡。
制作及试验
首先装、焊接电压调节器及芯片插座,然后电路上电,检测在C及驱动器接电源端的电压正确性。
将、焊所有的电阻并再次上电,检测所有上拉的管脚应是5V,下拉的管脚应是地电平。

注意加上两个集成电路之间的所需的连接线。
编码器有三个脚。中间脚是接地脚。用一些导线将三个脚接到印制板的三端连接块上。
有两个单刀双掷开关在印制板上,它用来选择半步距及单/双相。将驱动器的9脚、10脚通过单刀双掷开关使它们接地。要注意的是两个开关不能都接在+V上,它将关断电机(即电机不转)。
装入驱动器IC及焊上步进电机的相应引线,装配工作结束。如果对电机的引线搞不清楚,可以用万用表Q档按图1来识别。电机的A、B、CD及两个+与驱动器的相应管脚连接。
你将发现,若是48步电机,则转动编码器一周将在双相驱动时电机转两周。连接连续旋转焊盘时,电机将轻快地旋转。
步进电机对电源电压变化是十分敏感的,在电机旋转过程中试改变电源电压,将使电机运行变得粗糙或平滑。














{kind=link}