崔迪个人照 崔迪潇博士为人机所师生做学术报告
2017-09-07
字体:
大中小
浏览:
文章简介:2014年12月19日下午,主题为"Open Street Map-based Multi-Boundary Detection"的学术讲座在人工智能与机器人研究所324会议室举办,崔迪潇博士围绕无人驾驶平台的车道和可行驶区域检测,向与会师生介绍了自己的研究成果,并与大家分享自己在意大利帕尔马大学的留学经历,以及对科研工作的感悟.人工智能与机器人研究所的部分教师及学生参加了此次活动.在讲座中,崔博士详细介绍了自己的科研工作,主要包含三个方面:基于开源地图数据的在线校正和ICP配准;基于
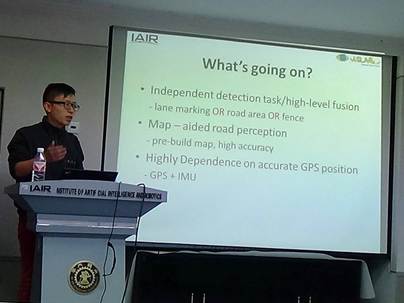
2014年12月19日下午,主题为“Open Street Map-based Multi-Boundary Detection”的学术讲座在人工智能与机器人研究所324会议室举办,崔迪潇博士围绕无人驾驶平台的车道和可行驶区域检测,向与会师生介绍了自己的研究成果,并与大家分享自己在意大利帕尔马大学的留学经历,以及对科研工作的感悟。人工智能与机器人研究所的部分教师及学生参加了此次活动。

在讲座中,崔博士详细介绍了自己的科研工作,主要包含三个方面:基于开源地图数据的在线校正和ICP配准;基于立体视觉的障碍物、车道、可行驶区域检测;基于视觉里程计的定位与导航。报告的最后,崔迪潇总结了此次报告的内容,指出了未来的研究方向,并将尝试把研究成果投入实际使用,推动无人车领域的发展。
崔迪潇也同在座的师生介绍分享了在意大利和欧洲留学生活的见闻和体会。良好的外语沟通能力,以及积极地同非中国人接触交流,是他这一年留学欧洲最大的感悟和收获。同时,他也对有志于出国访学深造的人机所学生从学习研究到生活等方面给出了中肯的建议。报告中,到场的老师与学生积极参与了相关知识的讨论与交流,此次学术报告取得了积极的反响和良好的效果。














{kind=link}